Star Trackers
VST-68M, VST-41M
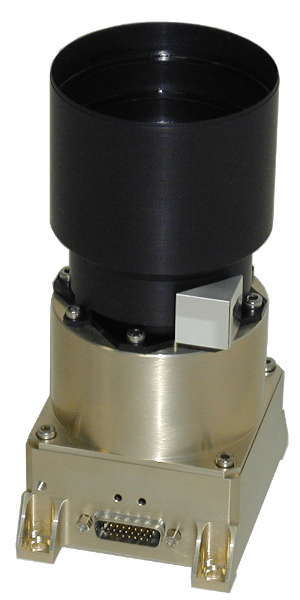
The optical head with the high quality lens system (Leica) and a mission dependent baffle in front of it VECTRONIC Aerospace offers with the VST-series high performance star trackers for small satellite applications with the technical capabilities and radiation tolerance suitable for LEO, GEO and even for interplanetary missions. The predecessors of these sensors, the VST-series, have been successfully used in various small satellite missions.
The star trackers consist of two main elements:
- The optical head with the high quality lens system (Leica) and the baffle in front of it
- The star tracker processing electronics with the on-board star catalogue
VST-68M
VST-41M
| Dimensions (with baffle) | 60 mm x 60 mm x 138 mm |
| Mass | 0.470 kg |
| Mounting pattern | 4 x M4 50 mm x 90 mm |
| Power consumption, max | 3.0 W |
| Input voltage range (VCD) | 9 to 40 |
| Signal interface | 2 x RS422 / 2 x CAN |
| Signal characteristics | Serial asynchronous / CAN |
| Connector Type | MDM-25 |
| Operating temp.range | -20°C to + 65°C |
| Storage temp. range | -40°C to + 80°C |
| Vibration | 20g rms random 3 axis |
| Radiation tolerance | > 20 krad |
| Accuracy 2σ (x,y / z axis) | 5 arcsec / 30 arcsec |
| Acquisition probability | > 99.7% |
| Update rate | 5 Hz |
| Field of view | 14° x 14° |
| Time of first acquisition | typ. 1 sec |
The VST-68M performs direct and autonomous measurement of the spacecraft attitude in the body fixed star tracker reference frame relative to the celestial reference system J2000.
Core element of the sensor’s processing electronics is a 1024 x 1024 pixel rad-hard CMOS sensor, specially developed for space applications, which transforms star images detected through the lens into electrical information. After the A/D conversion the CPU analyses the incoming data through a series of several algorithms, which eliminate fixed pattern noise, objects that are too bright like the Moon or planets and then determine star positions using a barycentric algorithm. With a focal length of 75 mm the sensor’s FOV is around 14°x14° which guarantees at least 16 visible stars independent of the current attitude. The attitude information is provided together with other status telemetry in the form of quaternions and/or Euler angles. The communication interface comprises two independent asynchronous SCI’s with a baud rate up to 1 Mbit. A redundant CAN bus interface is also available.
| Dimensions (with baffle) | 80 mm x 100 mm x 180 mm |
| Mass | 0.7 to 0.9 kg |
| Mounting pattern | 4 x M4 66 mm x 90 mm |
| Power consumption, max | 2.5 W |
| Input voltage range (VCD) | 9 to 18 or 18 to 40 |
| Signal interface | RS422 / RS485 |
| Signal characteristics | Serial asynchronous |
| Connector Type | SUB HD26 male, or MDM-25 |
| Operating temp.range | -20°C to + 65°C |
| Storage temp. range | -40°C to + 80°C |
| Vibration | 20g rms random 3 axis |
| Radiation tolerance | > 20 krad |
| Accuracy 2σ (x,y / z axis) | 18 arcsec / 122 arcsec |
| Acquisition probability | > 99.7% |
| Update rate | 4Hz |
| Field of view | 14° x 14° |
| Time of first acquisition | typ. 800 ms |
The VST-41M performs direct and autonomous measurement of the spacecraft attitude in the body fixed star tracker reference frame relative to the inertially fixed celestial reference system.
Core element of the sensor’s processing electronics is a 512 x 512 pixel rad-hard CMOS sensor, especially developed for space applications, which transforms star images detected through the lens into electrical information. After the A/D conversion the CPU analyses the incoming data through a chain of several algorithms, which eliminate fixed pattern noise, objects that are to bright like the Moon or planets and then determine star positions using a barycentric algorithm.
With a focal length of 50 mm the sensor’s FOV is around 14°x14° which guarantees at least 10 visible stars independent of the current attitude. After the first acquisition, which takes typically 800 ms, the sensor, operating with an update rate of 4 Hz, calculates the attitude with a 2σ accuracy of better than 18 arcsec for each individual star frame.
The probability of attitude acquisition at spacecraft angular rates lower than 0.3 deg/sec is better than 99.7%. The attitude information is provided together with other status telemetry in the form of quaternions and Euler angles. The communication interface comprises two independent asynchronous SCI’s with a baud rate up to 1 Mbit.